Architetture parallele
L’inserimento
di un pipelining nell’architettura di un microprocessore tradizionale (SISD)
consente di introdurre una sorta di parallelismo nell’organizzazione di un
microprocessore.
Infatti, mentre uno stadio provvede ad effettuare le elaborazioni che gli
competono riguardo ad un ‘istruzione, lo stadio precedente, rimasto libero, può
effettuare le operazioni che gli competono riguardo all’istruzione successiva.
Nella
figura abbiamo l’esempio di un pipeline a quattro stadi: dal disegno appare
evidente che, fatta eccezione per i tre cicli iniziali necessari a riempire il
pipeline, ad ogni ciclo di clock vengono trattate quattro istruzioni alla
volta. Stiamo eseguendo in parallelo quattro istruzioni. Questo
parallelismo, però, non è perfetto. Osserviamo, infatti, che al ciclo di clock
T4 uscirà dal pipeline l’output della prima istruzione, al ciclo T5 emergerà
dal pipeline l’output della seconda istruzione e così via. Se il parallelismo
fosse perfetto ad ogni ciclo di clock dovrebbe emergere dal pipeline l’output
di tutte e quattro le istruzioni. Il parallelismo introdotto dall’architettura
pipeline viene detto parallelismo temporale.
Si parla,
invece, di parallelismo spaziale quando si hanno più unità di
elaborazione che possono eseguire contemporaneamente più istruzioni. Ad ogni
ciclo di clock più risultati emergono contemporaneamente dalle unità di
esecuzione.
Definizione di parallelismo
Definiamo
come massimo grado di parallelismo il numero massimo di bit che il
nostro microprocessore può elaborare contemporaneamente durante un ciclo
macchina. Se, ad esempio, abbiamo una struttura SIMD con quattro unità di
elaborazione ed ogn’una di queste ha una architettura pipeline costituita da 5
stadi, supponendo che tale microprocessore opera su dati lunghi 64 bit, ogni unità elaborerà
contemporaneamente un numero di bit pari alla lunghezza dei dati moltiplicato
il numero degli stadi del pipeline (che lavorano contemporaneamente su dati
diversi)
![]()
Poiché abbiamo
quattro unità di elaborazione, il parallelismo totale si otterrà moltiplicando
il dato precedente per il numero delle unità
![]()
Ora questo
è il parallelismo massimo poiché non è detto che, ad ogni ciclo di clock, tutte
le unità di esecuzione stiano lavorando. Se, ad esempio, si sta eseguendo
un’istruzione con operandi scalari e non vettoriali, opera una sola unità di
esecuzione. Quindi, ad ogni ciclo di clock, abbiamo un parallelismo
![]()
Si può
calcolare un parallelismo medio sommando il parallelismo registrato in ogni
ciclo di clock e facendone la media sul numero n dei cicli di cicli di clock
totali.
![]()
Il rapporto
fra il parallelismo medio ottenuto negli n cicli di clock e il parallelismo
massimo prende il nome di tasso di utilizzo
![]()
Il grado
massimo di parallelismo si ottiene moltiplicando la lunghezza delle word
utilizzate dal microprocessore per la lunghezza del bit slice. Dato un
certo numero di parole, si chiama bit slice la stringa di bit che si ottiene
estraendo dalle parole tutti i bit che occupano la stessa posizione.
Se
riprendiamo l’esempio di prima, consideriamo le parole a 64 bit presenti in
tutte le unità di elaborazione, ed estraiamo, ad esempio, tutti i bit che
occupano la prima posizione in ogni parola. Poiché abbiamo 5*4=20 parole , otterremmo
uno slice costituito da 20 bit. Moltiplicando il bit slice m per la lunghezza n
di ogni word abbiamo il numero totale di bit che possono essere elaborati
contemporaneamente.
P = n*m
Assenza di cicli in una elaborazione vettoriale.
Un
processore scalare, per elaborare dati vettoriali deve procedere attraverso
esecuzioni cicliche di operazioni scalari. Ad esempio, per effettuare una somma
di due vettori, dovremo eseguire il seguente ciclo
for (i=0;i<n;i++)
{
C[I]= A[I]+
B[I]
}
Una
notevole parte del tempo impiegato per eseguire la somma dei due vettori sarà
assorbita dalle operazioni di incremento del contatore e di valutazione della
condizione di fine ciclo.
Un
elaboratore di tipo vettoriale non necessita di cicli e l’esecuzione della
somma vettoriale potrà essere effettuata mediante l’esecuzione di una sola
istruzione
C[1:n] = A[1:n] + B[1:n]
Se la
lunghezza del vettore è minore o pari al numero delle unità di elaborazione ,
la somma avverrà in un sol colpo
Se, invece,
i vettori hanno una lunghezza superiore al numero di unità di elaborazione,
l’unità di controllo del microprocessore dovrà suddividere i vettori operandi
in blocchi di più scalari e li ripartisce fra le varie unità di esecuzione. In
tal caso l’operazione di somma non avverrà in un sol colpo, ma in ogni caso è
più veloce di quella di processore scalare soprattutto per il fatto che il
controllo dei cicli è affidato all’hardware e non al software.
SIMD:
ORGANIZZAZIONE DI BASE
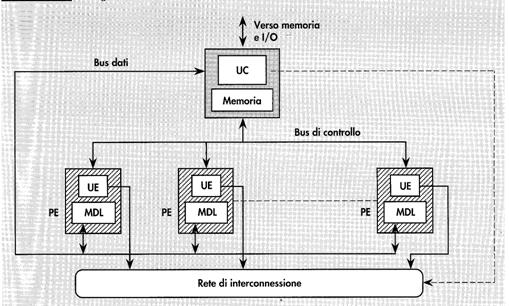
Nella
figura seguente abbiamo lo schema dell’organizzazione di un processore
vettoriale. In tale struttura, una batteria di elementi di elaborazione, detti Processing
Elements PE, agisce sotto la supervisione di un’unica unità di controllo
UC. L’Unità di Controllo è l’unica a poter dialogare con la memoria e le unità
di IO esterne al processore. I PE sono dotati di un’area locale di memoria
detta Memoria dati Locale (MDL), nella quale vengono memorizzati i dati
distribuiti dalla unità di controllo. L’unità di controllo contiene anch’essa
una memoria locale, le unità di decodifica e controllo vere e proprie, ed,
infine, un processore scalare: quando viene effettuato il fetch di
un’istruzione vettoriale
Lo scambio
delle informazioni tra UC ed elementi di elaborazione avviene tramite gli
appositi bus interni.
La rete di
interconnessione, anch’essa sotto il controllo della UC, garantisce lo scambio
dei dati tra i diversi PE. Infatti, in alcuni algoritmi è utile lo scambio dei
dati fra le varie unità. Un possibile esempio è quello del calcolo delle somme
parziali degli elementi di un vettore
|
|
|
|
|
|
|
|
|
V(0) |
V(1) |
V(2) |
V(3) |
|
|
|
2 |
3 |
1 |
7 |
|
|
|
|
|
|
|
|
Dato il
vettore dell’esempio volgiamo effettuare le somme parziali dei suoi singoli
elementi. La somma parziale di ordine k sarà data da
![]()
per cui
S(0) = V(0) = 2
S(1) = V(0)+V(1) =2+3
S(2) = V(0) +V(1)+V(2) = 2+3+1
S(3) =
V(0)+V(1)+V(2)+V(3)=2+3+1+7
Tenendo
presente che
S(1) = S(0)+V(1)
S(2) =
S(1)+V(2)
S(3) =
S(2)+V(3)
Possiamo
immaginare il seguente algoritmo:
nel primo
passo i componenti del vettore vengono distribuiti fra tutte le PE
|
|
|
|
|
|
|
|
|
PE0 |
PE1 |
PE2 |
PE3 |
|
|
|
2 |
3 |
1 |
7 |
|
|
|
|
|
|
|
|
Nel secondo
passo ogni PE effettua la somma fra il suo dato e quello del PE precedente
|
|
|
|
|
|
|
|
|
PE0 |
PE1 |
PE2 |
PE3 |
|
|
|
2 |
3+2=5 |
1+3=4 |
7+1=8 |
|
|
|
|
|
|||
|
|
|
||||
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Nell’ultimo
passo ogni PE effettua la somma fra il suo contenuto e quello del PE che si
trova due posizioni prima
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
PE0 |
PE1 |
PE2 |
PE3 |
|
|
|
|
2 |
5 |
4+2=6 |
8+5=13 |
|
|
|
|
|
|
|
|||
|
|
|
|
||||
|
|
|
|
||||
|
|
|
|
||||
|
|
|
|
||||
Questo
problema è un esempio della possibilità che sia necessario un trasferimento di
dati fra i vari PE.
L’UNITA’
DI CONTROLLO
Il compito
fondamentale dell’unita’ di controllo e’ quello di prelevare dalla memoria
istruzioni e dati, decodificare le istruzioni, eseguire immediatamente
istruzioni scalari e di controllo, oppure configurare gli elementi di
elaborazione e diffondere i dati per sovrintendere all’esecuzione distribuita
di istruzioni vettoriali.
Per
realizzare tali funzionalita’,
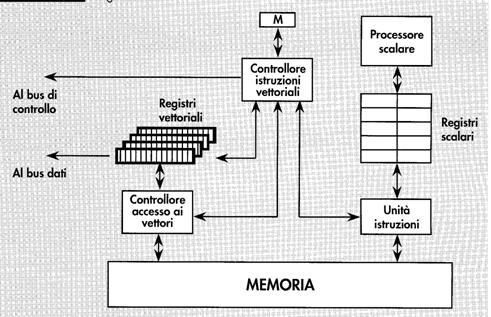
Il fetch e
il riconoscimento delle istruzioni e’ demandato all’Unita’ Istruzioni:
Tali
istruzioni saranno eseguite dal processore scalare.
Ogniqualvolta
l’Unita’ Istruzioni riconosce un’istruzione vettoriale, il monitoraggio della
sua esecuzione passa al controllore delle istruzioni vettoriali, che ne
iniziera’ la decodifica.
Il
successivo compito del CIV e’ il calcolo degli indirizzi effettivi degli
operandi vettore, il cui fetch dalla memoria e’ demandato al controllore di
accesso ai vettori: dopo aver calcolato tali indirizzi, il CIV dovrà scomporre
i vettori nei sottovettori da distribuire ai vari elementi di elaborazione.
Tali
insiemi di dati saranno temporaneamente immagazzinati nei registri vettoriali.
Non è detto
che tutti i PE siano impegnati nell’esecuzione di un’istruzione: è l’unità di
controllo a stabilire quali PE saranno coinvolti nell’esecuzione
dell’istruzione.
Sarà ancora
il controllore delle istruzioni vettoriali a inviare tramite il bus di
controllo i segnali necessari al mascheramento dei PE: a tale scopo viene
utilizzato un opportuno registro maschera.
Tutte le
unita’ descritte sono pipelined.
GLI
ELEMENTI DI ELABORAZIONE
Nella
figura e’ raffigurata la configurazione di ognuno dei PE che costituiscono il
vettore di processori in una generica architettura SIMD.
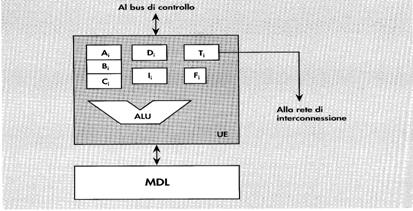
Ogni elemento
di elaborazione e’ costituito da una memoria dati locale MDL e da una unita’ di
elaborazione che contiene una ALU e un insieme di registri scalari.
L’indice i
associato a ogni registro indica che il registro appartiene all’i-esimo PE.
In
particolare:
![]() ·
Ai,Bi,Ci costituiscono un banco di registri di lavoro di uso generale.
·
Ai,Bi,Ci costituiscono un banco di registri di lavoro di uso generale.
![]() ·
Ii, e’ un registro indice predisposto per contenere un offset tramite il
quale indirizzare i singoli dati presenti nella propria MDL.
·
Ii, e’ un registro indice predisposto per contenere un offset tramite il
quale indirizzare i singoli dati presenti nella propria MDL.
![]() ·
Di e’ un registro che consente di indirizzare un qualsiasi altro PE.
·
Di e’ un registro che consente di indirizzare un qualsiasi altro PE.
![]() ·
Ti e’ il registro di trasferimento: rappresenta la sorgente o la
destinazione per le operazioni di trasferimento dati tra diversi PE.
·
Ti e’ il registro di trasferimento: rappresenta la sorgente o la
destinazione per le operazioni di trasferimento dati tra diversi PE.
![]() ·
Fi e’ il flag che indica lo stato del PE. Solamente i PE abilitati concorrono all’esecuzione
dell’istruzione distribuita dalla UC.
·
Fi e’ il flag che indica lo stato del PE. Solamente i PE abilitati concorrono all’esecuzione
dell’istruzione distribuita dalla UC.
Da un punto di vista logico, un problema di fondamentale importanza per l’efficienza dell’elaborazione e’ una efficace distribuzione degli operandi vettore tra le diverse MDL da parte dell’Unita’ di controllo.